Système de chariots de lentilles (CSEM)
Le but de ce projet est de trouver des solutions pour la réalisation d’un système de chariots de lentilles. Le but du système est d’obtenir trois choix de divergence du flash d’une caméra 3D TOF (time of flight). Un changement de divergence provoque un agrandis-sement ou un rapetissement de la zone illuminée au sol.
La caméra 3D TOF est notamment employée pour l’atterrissage au sol de modules spatiaux. Elle peut aussi être utilisée pour la mise en contact de deux modules spatiaux dans l’espace. Dans notre cas on utilise ce type de caméra pour restituer l’image 3D du terrain (distance jusqu’à 10 m dans notre projet) pour s’assurer que le sol est assez plat et permet l’atterrissage du module spatiale. La caméra 3D doit supporter toutes les contraintes liées au spatial (chocs dus au lancement de la fusée, vibrations, basses et hautes températures,...).
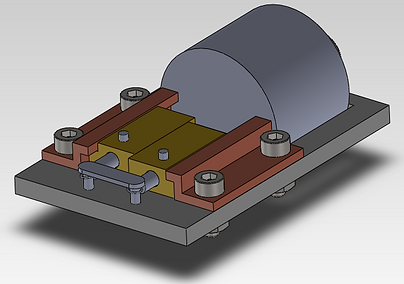
Conception 3D du système de chariots (2014)